

咨詢服務熱線:
0871-64151806
+
 微信號:WANGYUNHUA
微信號:WANGYUNHUA

微信號:WANGYUNHUA
劃測量價格")

-
 全國服務熱線
全國服務熱線
- 0871-64151806
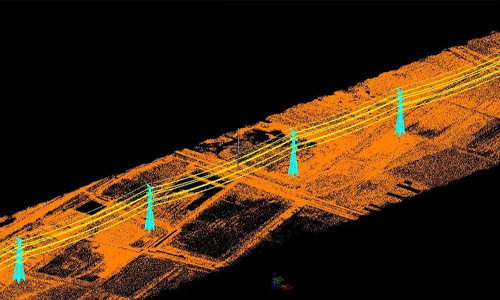
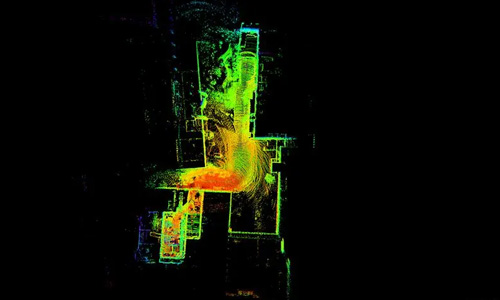
激光點云數(shù)據(jù)
通過對激光測距數(shù)據(jù)、IMU姿態(tài)數(shù)據(jù)、DGPS數(shù)據(jù)以及掃描角數(shù)據(jù)進行相應的處理,獲得巨量離散、形似云狀的激光腳點的三維坐標信息,激光點云數(shù)據(jù)。應用一定的數(shù)學算法對點云數(shù)據(jù)進行濾波、分類、建筑物邊緣提取以及建筑物三維重建等數(shù)據(jù)后處理。
內(nèi)容介紹
/ introduce

(此內(nèi)容由m.xqha.cn提供)
上一條: 激光雷達點云數(shù)據(jù)
下一條: 激光點云數(shù)據(jù)處理
【相關(guān)產(chǎn)品】



-
聯(lián)系我們
CONTACT
-
 服務熱線:0871-64151806
服務熱線:0871-64151806
-
 公司地址:云南省昆明市滇池度假區(qū)紅塔東路12號滇池衛(wèi)城紫廬21幢-2號
公司地址:云南省昆明市滇池度假區(qū)紅塔東路12號滇池衛(wèi)城紫廬21幢-2號
-
 聯(lián)系郵箱:[email protected]
聯(lián)系郵箱:[email protected]
-
 網(wǎng)站制作:云南熱搜科技
網(wǎng)站制作:云南熱搜科技

 添加微信
添加微信
 聯(lián)系我們
聯(lián)系我們
 電話咨詢
電話咨詢